Deep Learning 3.Probability and Information Theory
영어로 쓰면 시간이 오래 걸려 이제부터 한글로..
Probability and Information Theory
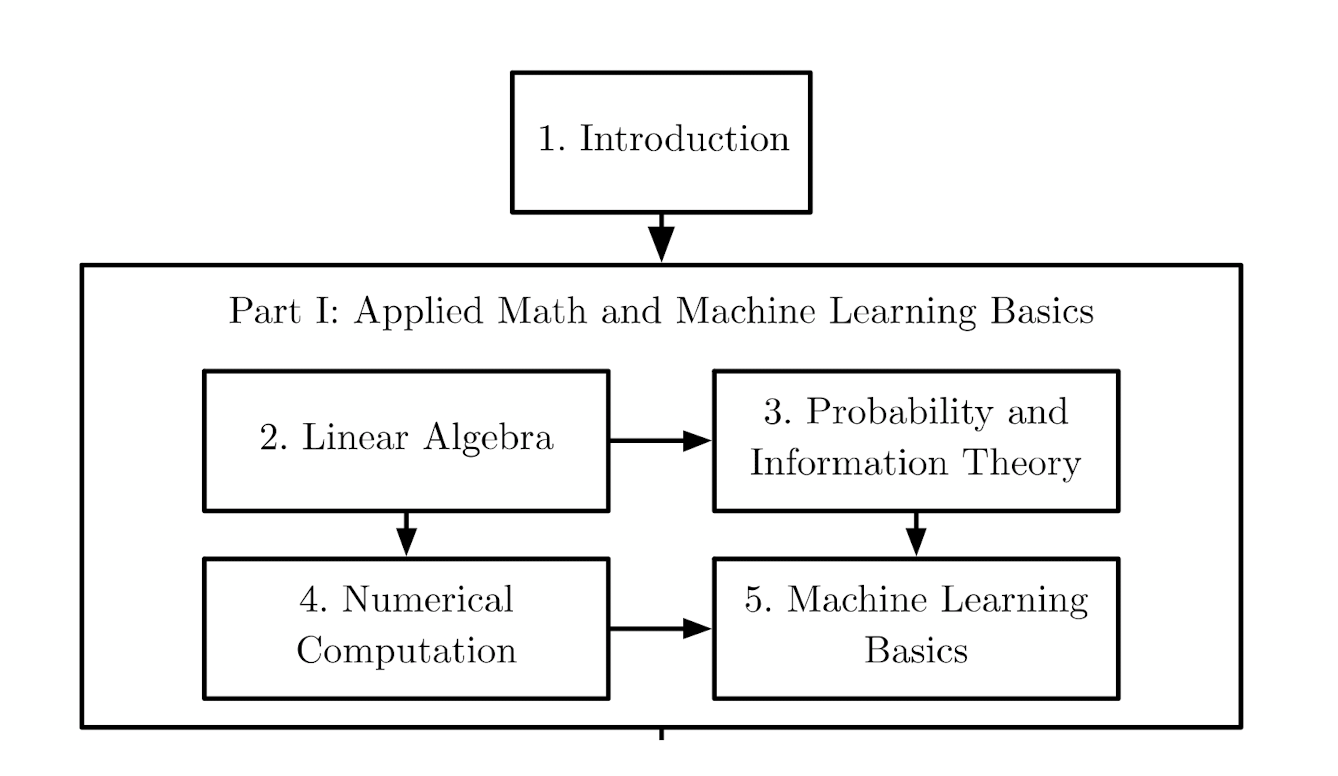 Organization of the book
Organization of the book
- Probability theory
- allows us to make uncertain statements and to reason in the presence of uncertainty.
- Information theory
- enables us to quantify the amount of uncertainty in a probability distribution.
3.1 Why Probability?
Probability는 deep neural networks를 만드는 데에 필수적이다.
Machine learning은 uncertain quantities 혹은 stochastic (non-deterministic) quantities를 다루기 때문에 이 uncertainty를 정량화하는 방법으로 probability를 사용하는 것이다.
There are three possible sources of uncertainty:
- Inherent stochasticity in the system being modeled.
- Incomplete observability.
- Incomplete modeling.
많은 경우에 certain하지만 복잡한 rule을 사용하는 것보다 uncertain하지만 간단한 rule를 사용하는 것이 실용적이다. (e.g., “Most birds fly” vs “Birds fly, except for very young birds that have … sick or injured birds …”)
Probability에는 두 가지 종류가 있는데,
- Frequentist probability
- A rate at which events occur.
- Bayesian probability
- Qualitative levels of certainty.
어차피 same formal rules가 적용된다. (자세한 것은 (Ramsey, 1926))
3.2 Random Variables
Measure theory에서 좀 더 deep하게 다룰 수 있지만, 일단은 값들을 랜덤하게 가질 수 있는 variable. RV 하나로는 어떤 state들이 가능한지에 대한 description이기 때문에 probability distribution과 페어를 이루어야 각 state들의 likelihood를 specify할 수 있음.
lowercase script letter로 씀.
Discrete or continuous.
3.3 Probability Distributions
Probability distribution은 how likely a random variable (or set)이 각 possible states를 취하는 지에 대한 description.
Variable이 discrete하냐, continuous 하냐에 따라 다름.
3.3.1 Discrete Variables and Probability Mass Functions
- Probability Mass Function (PMF)
- A probability distribution over discrete variables may be described using a probability mass function.
E.g., Uniform distribution: $P(\mathbf x = x_i) = {1\over k}$.
Properties:
- P의 domain은 $\mathbf x$의 모든 possible states의 set이어야 한다.
- $\forall x \in \mathbf x, 0 \le P(x) \le 1$. 즉 모든 확률은 0과 1사이어야 함.
- $\sum_{x\in \mathbf x} P(x) = 1$. 모든 possible states의 확률 sum은 1. (normalized)
3.3.2 Continuous Variables and Probability Density Functions
variable이 continuous하다면 조근 다르게 density를 통해 표현해야 한다.
- Probability Density Function (PDF)
- A probability distribution over continuous variables may be described using a probability density function.
E.g., Uniform distribution: $u(x;a,b) = {1\over b-a}$. (;는 “parameterized by”를 의미함.)
Properties:
- PMF와 마찬가지로 p의 domain은 모든 possible states의 set.
- $\forall x \in \mathbf x, p(x) \ge 0$.
- (density이기 때문에 1 이하라는 constraint는 없어도 됨.)
- $\int p(x) dx = 1$
- Given interval $[a, b]$, $\int_{[a,b]} p(x) dx = 1$
3.4 Marginal Probability
Marginal probability는 RV들의 subset에 대한 probability distribution을 일컫는다. 밑의 $\mathbf y$가 일종의 subset(?)
- The sum rule
- \[\begin{align} \forall x \in \mathbf x, P(\mathbf x=x)&=\sum_y P(\mathbf x = x, \mathbf y = y) \\ p(x) &= \int p(x,y)dx \end {align}\]
각각 discrete, continuous variable에 관한 sum rule.
3.5 Conditional Probability
주어진 다른 event가 있을 때의 probability를 말한다.
\[P(\mathbf y = y \mid \mathbf x = x) = {P(\mathbf y = y, \mathbf x = x) \over P(\mathbf x = x)}\]3.6 The Chain Rule of Conditional probabilities
Any joint probability는 chain rule을 통해 아래처럼 conditional distributions로 decompose할 수 있다.
\[P(\mathbf x^{(1)}, \dots , \mathbf x ^{(n)}) = P(\mathbf x^{(1)} \Pi^n_{i=2} P(\mathbf x^{(i)} \mid \mathbf x^{(1)}, \dots, \mathbf x^{(i-1)}).\]더 쉬운 아래 예시. \(P(a,b,c) = P(a \mid b,c) P(b,c) = P(a \mid b,c) P(b \mid c )P(c)\)